檢測(cè)服務(wù)
培訓(xùn)服務(wù)
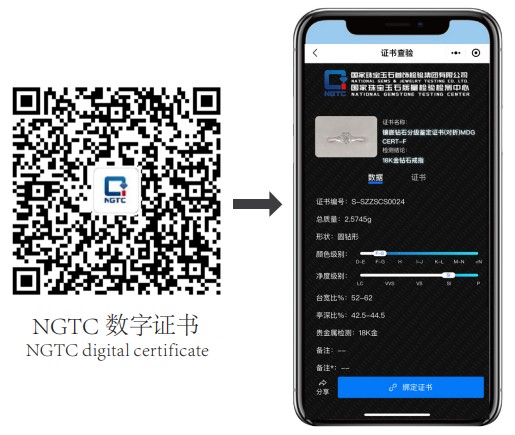
數(shù)字服務(wù)
儀器研發(fā)
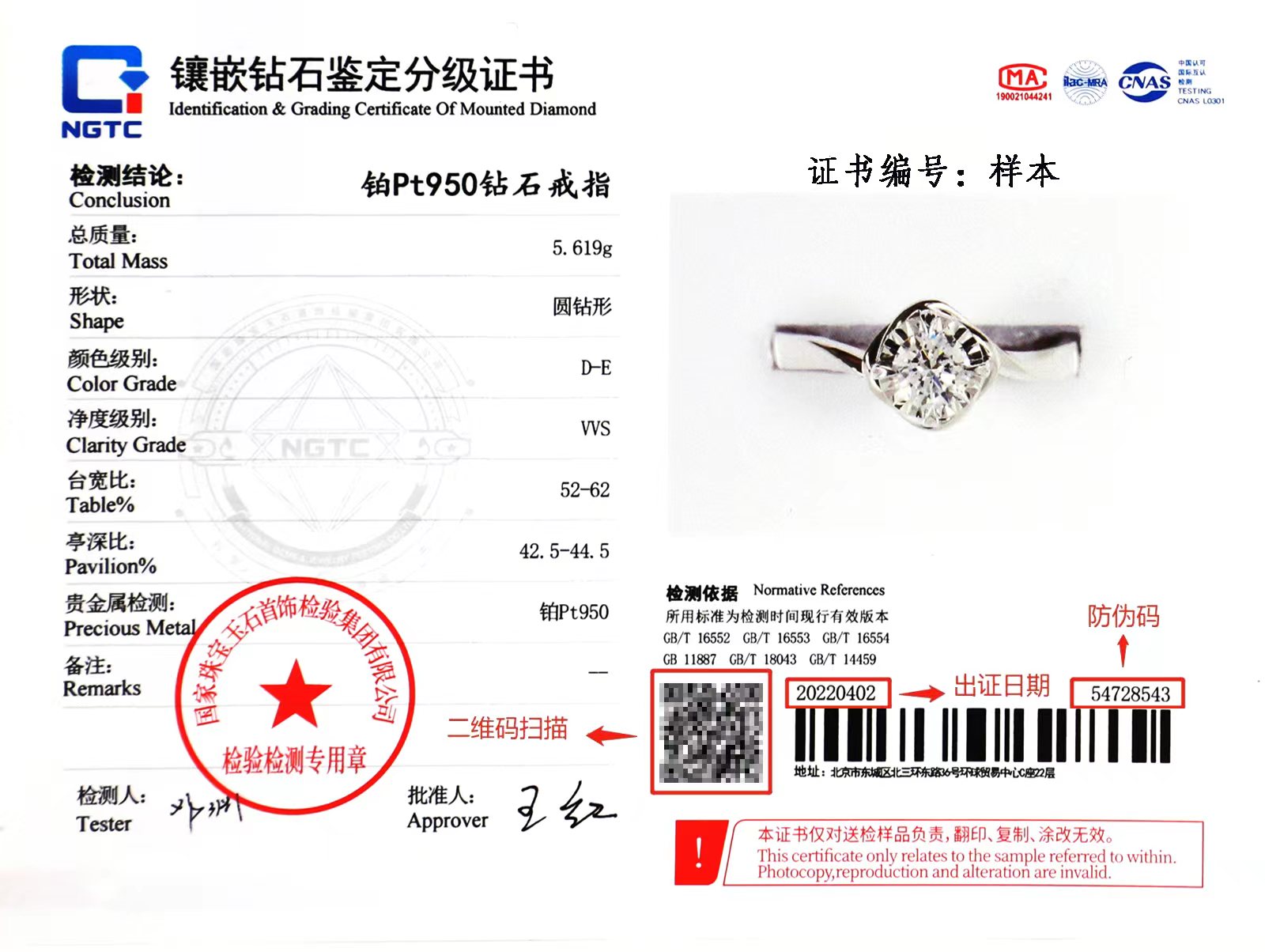
證書(shū)編號(hào)
防偽碼
證簽編號(hào)
姓名
身份證號(hào)
珠寶國(guó)檢 中國(guó)珠寶行業(yè)網(wǎng) 珠寶國(guó)檢深圳實(shí)驗(yàn)室 珠寶國(guó)檢北京實(shí)驗(yàn)室 珠寶國(guó)檢集團(tuán)培訓(xùn)中心 NGTC國(guó)檢教育 國(guó)檢珠寶培訓(xùn)中心上海分校 珠寶國(guó)檢集團(tuán)培訓(xùn)中心廣州 珠寶國(guó)檢NGTC研究所
珠寶國(guó)檢
珠寶國(guó)檢 國(guó)檢珠寶培訓(xùn)中心
關(guān)于我們 聯(lián)系我們
版權(quán)所有?國(guó)家珠寶玉石首飾檢驗(yàn)集團(tuán)有限公司京ICP備2024047581號(hào)-2